Auto Vectorization
Function Description: According to the horizontal cross-section, the point cloud data is intercepted, and the planar line vectors are automatically extracted from the intercepted point cloud data.
Note: This function is applicable to indoor house plans and other needs, line elements obvious data
Steps
1.Click the Automatic Vectorization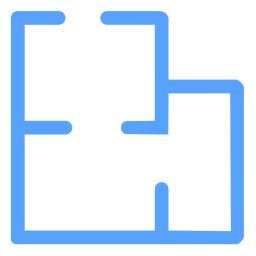 button to bring up a pop-up box:
button to bring up a pop-up box:
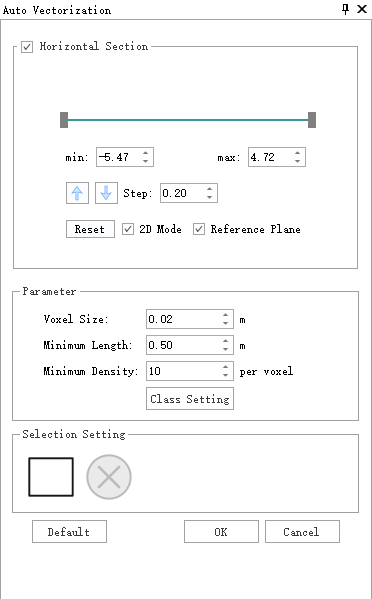
Parameter Dialogue
- **Parameter Description:**
- Horizontal Section Tool
: Used to adjust the position and thickness of the horizontal section.
- **Minimum / Maximum**: Define the lower and upper positions of the horizontal section.
- **Vertical Size**: Sets the movement increment. Combined with the “move up” or “move down” buttons, the section can be shifted by the specified step size.
- **Reset**: Restores all parameters to their default values.
- **Plane Height**: Displays the real-time height of the horizontal section.
- When checked: locks the plane height so it does not change with the minimum value (manual input allowed).
- When unchecked: the plane height updates dynamically with the minimum value.
> To ensure data quality, the extracted horizontal section should exclude horizontal surfaces such as floors and ceilings as much as possible, keeping only vertical wall structures. To maintain sufficient point density, a thickness (Maximum − Minimum) of at least 0.5 meters is recommended.
- Parameters:
- **Voxel Size**: The sampling resolution of the point cloud data.
> Smaller voxels provide higher resolution and accuracy but increase computation time. The default value is recommended.
- **Minimum Length**: The shortest length of generated vector lines. Lines shorter than this threshold will be filtered out, helping remove small fragmented segments. Adjust based on actual needs.
- Maximum Wall Thickness: During point cloud acquisition, a wall is often captured as two separate planes.
- Increase this value to merge them into a single vector line.
- Decrease it to keep them separated.
- If set too small, it may affect proper extraction.
- **Corner Radius**: The search radius used to detect intersections at wall corners.
- **Class Settings**: Used to specify which point cloud categories participate in the calculation. After classification, it is recommended to select only relevant categories (such as walls and columns) for floor plan generation.
- Selection Settings:
- **Polygon Selection**: Selects a region of the point cloud; only vector data within this region will be generated. By default, all point cloud data is used.
- **Cancel Selection**: Clears the selected region.
- **Create Layer**: Manually creates a floor plan vector layer and a corresponding annotation layer. The layer height is based on the defined plane height of the horizontal section.
- **Default**: Restores parameter settings to their default values.
- **Extract**: After setting parameters, click “Extract” to start automatic detection. If no floor plan layer with a defined plane height exists, a vector layer and a corresponding annotation layer will be created automatically.
- **Cancel**: Exit the function.
2.Click OK to detect automatically
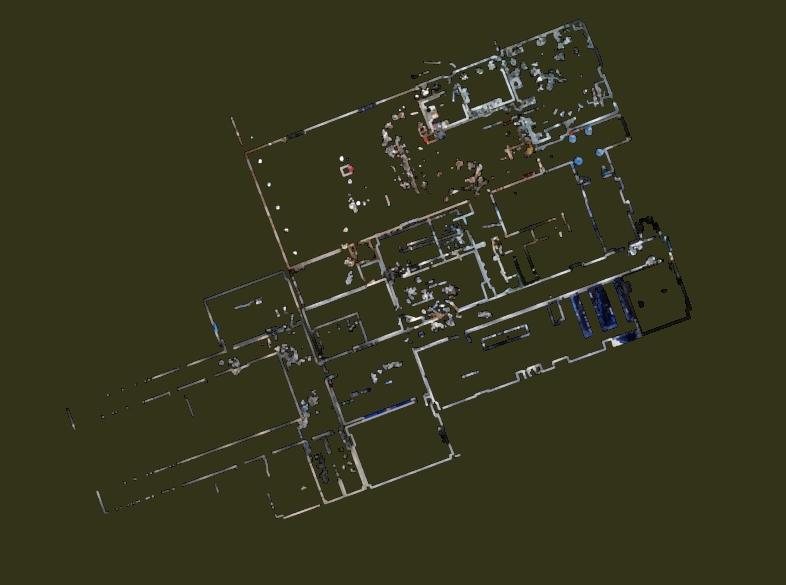
Horizontal section point cloud

Detection results