Split Point Cloud
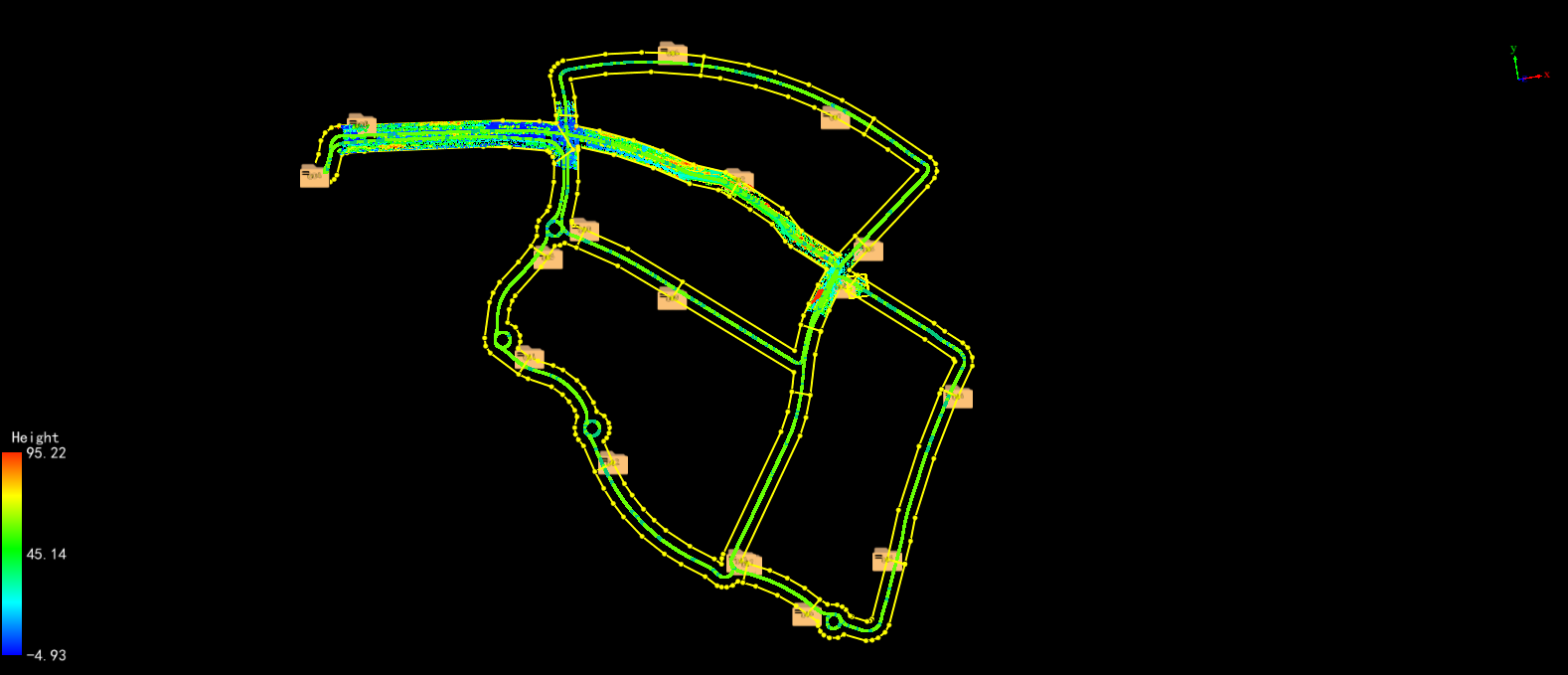
Function Description: This function is used to segment the point cloud according to the framing frame after the trajectory framing is used.
Steps
1.Click Split Point Cloud![]() , which will directly segment the point cloud.
, which will directly segment the point cloud.
2.If the point cloud has been segmented, a dialog box will appear:
3.Click the Yes button to re-segment the point cloud, and click No to cancel the point cloud segmentation.