LiGrip Data Gaussian Reconstruction Workflow (Multi Project)
Concepts
Note: Gaussian reconstruction leverages the properties of Gaussian distributions to effectively model geometry and appearance, achieving high-quality reconstruction and real-time rendering. The Gaussian method depicts the scene as millions or more 3D Gaussian ellipsoids, each with attributes such as position, scale, opacity, color, and others. These attributes allow for rendering that closely approximates real-world scenes.
1.Select Project for Reconstruction
Click the "GS Reconstruction" - "LiGrip " button to start the reconstruction process. Since Gaussian reconstruction consumes substantial system resources, if the project is already loaded in the software, the system will prompt you to close the current project to free up resources.
Select "OK," and in the file selection window that appears, choose the previously processed .mscan file as the input data.
Note:
- The software only supports Gaussian reconstruction for data collected from O1_Lite/O2_Lite,H300 and O2.
- The selected project must have completed point cloud processing and colorization, and the resulting point cloud must include RGB attributes.
- Before performing Gaussian reconstruction, ensure that Dynamic Object Removal, Smoothing Filter, and Auto Mask are selected during processing. If moving objects still appear in the processed point cloud, manually classify them in the processing project.
2.Fix Original Camera Files
If the selected processed project is missing the camera folder, the system will prompt the user to specify the corresponding original camera folder to ensure data integrity.
3.Fix Original Camera Files
After selecting the project, a parameter settings window will pop up. First, check the projects that need to be reconstructed. Then, users can configure the corresponding reconstruction parameters in this interface to optimize the quality and speed of Gaussian reconstruction.
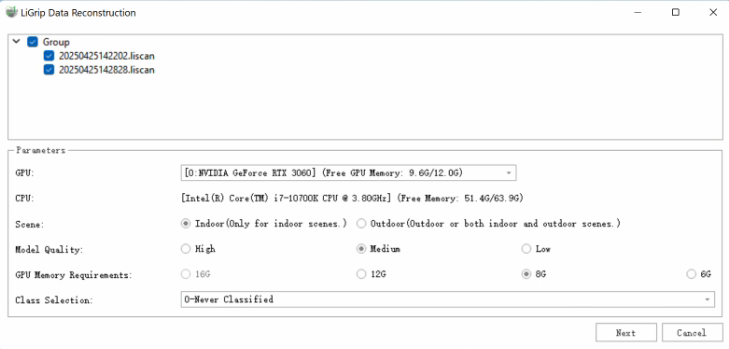
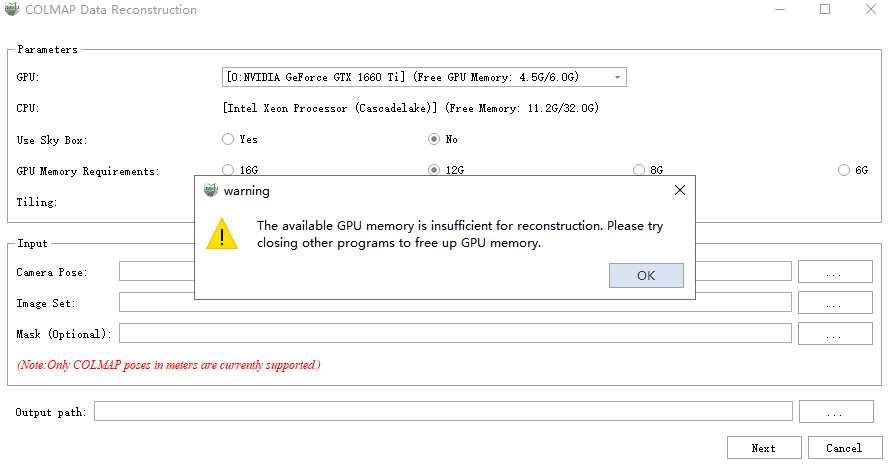
Parameter Settings
- GPU: Select the GPU to be used for Gaussian reconstruction. Currently, only single-GPU computation mode is supported.
- CPU: Displays the current CPU model and memory capacity of the system, allowing users to understand the system resource configuration.
- Scene: In Gaussian reconstruction, you can choose an appropriate reconstruction mode based on the application scenario to optimize model accuracy and resource usage. The main modes include:
- Indoor: Suitable for point cloud data reconstruction in indoor environments such as buildings, small spaces, or enclosed areas.
- Outdoor: Suitable for point cloud data reconstruction in outdoor environments such as urban streets, large-scale terrain, open spaces, or indoor-outdoor mixed scenarios.
- Image Quality: The higher the selected image quality, the larger the amount of image data used, and accordingly, the longer the required processing time, in order to ensure the accuracy of the model and the level of detail it represents.
- Remaining GPU Memory: Specifies the remaining GPU memory required for the next reconstruction.
- Class Selection: Select specific class of point clouds for reconstruction.
4.Start Reconstruction
1)Click the "Start" button to begin the reconstruction. Before starting the reconstruction, the system will check the remaining GPU memory and system memory.
2)If the system resources meet the reconstruction requirements, the system will start the reconstruction process. The log window and progress bar will display the current processing steps and overall progress in real time.
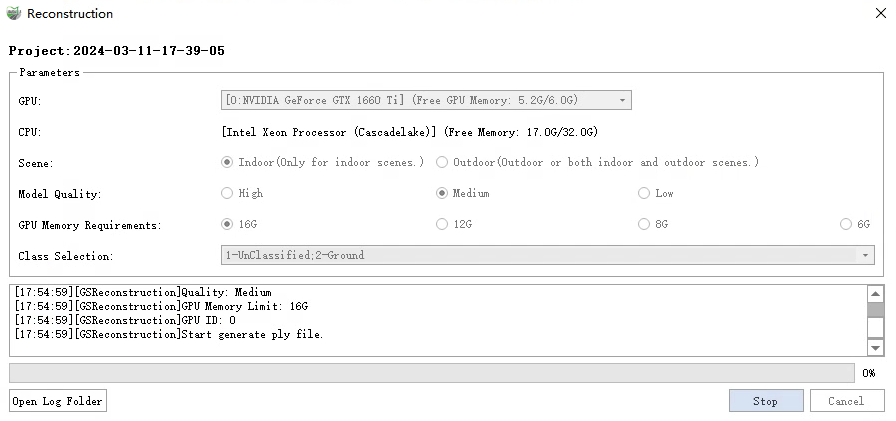
Note: During the reconstruction process, the generated point cloud slice files and log files are automatically saved to the current project's Temp and Log directories. For example,
0_1.plyis saved as the point cloud slice file, andReconstruction_2024-10-21-13-50-03_LiDAR360MLS.logis saved as the log file for the inference process.