Triangulation Modeling(Poisson)
Functional Overview
Triangulation Modeling(Poisson) is used to generate a 3D model file in .obj format using point clouds. Prior to running this function, Tunnel Normal Computation must be performed on the point cloud. Set parameters and preview results in the window on the right-hand side of the screen. Adjust density parameters for optimal results before saving.
Usage
Click Mine > Tunnel > Triangulation Modeling(Poisson).
Parameter Settings
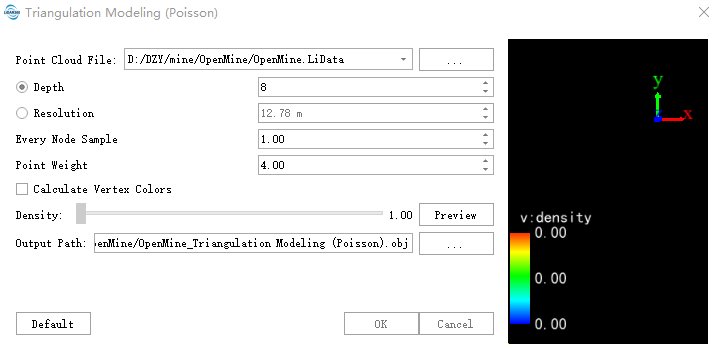
- Point Cloud File: Input one or multiple point cloud data files. File format: *.LiData.
- Depth: Only one of Depth or Resolution parameters takes effect. The depth of the octree constructed for point cloud reconstruction. A deeper depth results in a denser reconstructed triangular mesh, preserving more details; conversely, a shallower depth produces a sparser mesh. Note: Avoid excessive depth to prevent octree node size from being smaller than the point spacing.
- Resolution: Only one of Depth or Resolution parameters takes effect. The resolution of the reconstructed implicit triangular mesh surface. Higher resolution yields a denser triangular mesh, preserving more details; lower resolution produces a sparser mesh.
- Every Hode Sample: The minimum number of points retained in each node after octree reconstruction, primarily used to reduce the impact of noise on the reconstruction results. Higher values enhance noise resistance but may cause more details to be ignored. For point clouds with minimal noise, set between 1.0~5.0; for point clouds with significant noise, set between 15~20.
- Point Weight: The weight of interpolated points in the Poisson implicit equation. Higher weight values result in a reconstructed implicit triangular mesh surface that closer approximates the original point cloud.
- Calculate Vertex Colors: Only effective if the original point cloud has color attributes. Uses the original point cloud colors to interpolate vertex colors for the reconstructed model, generating a model with vertex color attributes.
- Density: The point density within octree nodes after reconstruction. Adjust this parameter during preview model generation to confirm the final reconstruction result.