Classify Water Points
Function Description
This tool is to classify the waterbody and extract its boundary. The thought behind this tool is that the waterbody is of low point cloud density, due to laser scanning characteristic. So, it set Grid Size(m) to rasterize the point cloud data. Then, use Density Threshold(p/m^2) to binarize the raster and perform morphological processing, to extract waterbody boundary larger than Min Area(m^2)).
Usage
Click Classify > Classify Water Points
Parameters
- File Name:The input file can be single or multiple point cloud dataset. You need to add the data into lidar360 first.
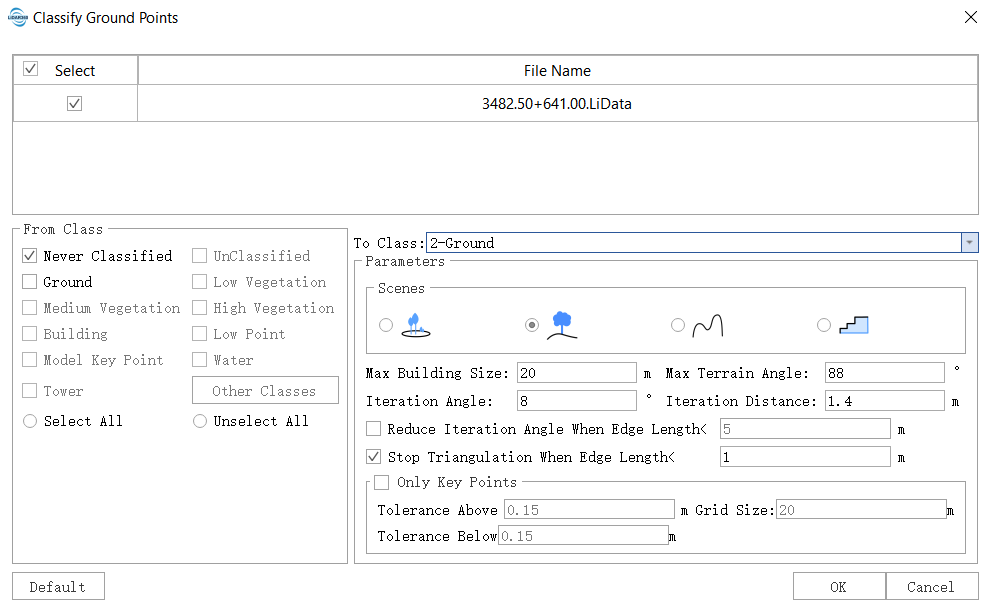
- From Class:Point cloud class to be classified.
- To Class:Target class.
- Grid Size(m):The grid size for rasterizing the point cloud. It is generally greater than the average point spacing.
- Density (p/m^2):Grid point density less than this value is marked as water area.
- Min Area(m^2)):Extract waterbody boundary larger than this value.
- Output Path:The output path of result data.